
K osmibitovým i jiným počítačům robotika prostě patří.
.V 80. letech se občas objevila obtížně sehnatelná a většinou drahá hračka – robotiská ruka.
Jednu moc pěknou vyráběly firmy Quickshot a Spectravideo.
Objevily se i různé jiné, od Lega, od Fischera, daly se smontovat podomácku z Merkuru.
RobotArm od QuickShoru měla pět stupňů volnosti, ovládat se dala dvěma ataráckými joysticky (každý ovládat dva motory, tlačítky se pak ovládalo otvírání a zavírání kleští, při pohybu kleští se rozsvěcelo automaticky osvětlení).
Data o nosnosti této robotické ruky mi nejsou známy.
Připojit se dala k počítači, který poskytoval plné ovládání portů pro joysticky (včetně přesměrování jako výstupních) nebo dostatek paralelních portů, na který by se daly joystickové vstupy robotiské ruky připojit (celkem 10 drátů pro ovládání pohybu, tedy aspoň dva osmibitové porty).
Firma Spectravideo jako výrobce osmibitových počítačů normy MSX vyráběla k hračce i interface pro MSX, který počítači dodal další dva „joystickové“ porty, plně ovladatelné, a obsahoval i ROMku s programovacím jazykem ROGO odvozeným od jazyka LOGO, pomocí kterého se dala ruka programově ovládat.
Jazyk obsahoval nejen příkazy pro pohyb ruky, ale i podmínky, rekurzi, a dokonce možnost grafického znázornění aktuální polohy a natočení robotické paže na obrazovce (screenshoty najdete v popise jazyka).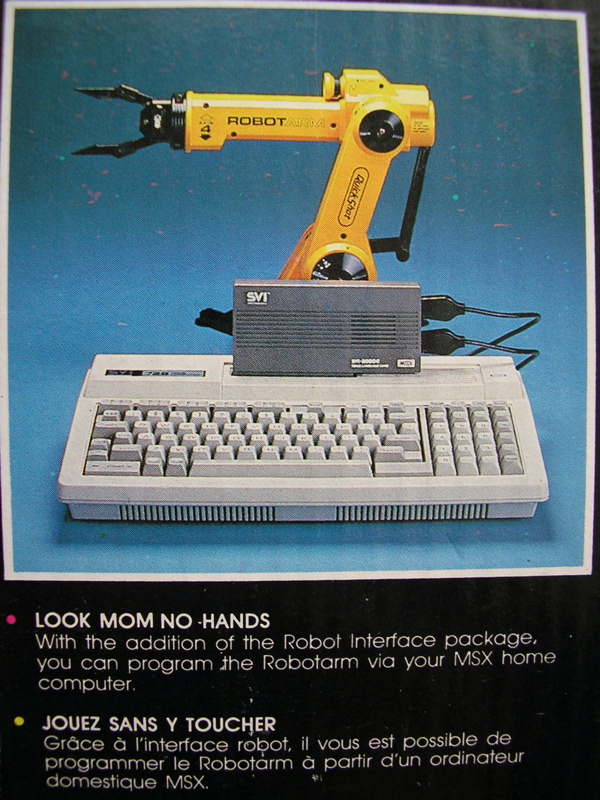
Doba jde ale dál.
Už se zdálo, že s sebou nová doba přinesla zapomnění na zábavné technické hračky, nedávno jsem ale narazil na překvapení:
Robotická ruka, se sedmi stupni volnosti (o dva více než stařičký Quickshot), se samostatně ovladatelným osvětlením, dokonce včetně ovládací jednotky, za přijatelnou cenu.
Dá se sehnat na eBayi z německa za zhruba 45 euro, poněkud dražší za 1600 korun se dá koupit i přímo v Čechách (například v Mironetu).
Nosnost paže je asi 100 g, úhlové rozsahy pohybu jsou 180, 120 a 300 stupňů. Místo ovládání spínači je možné připojit svůj počítač.
Ideální pro připojování se jeví ZX Spectrum s interface typu UR-4.
Pokud máte rádi seriál „ZX Magazín a robotika“, který vycházel na pokračování v ZX Magazínu, nemusíte bastlit vlastního robota z Merkuru, Lega nebo dřevěných klacků, je tady profesionálně zhotovená stavebnice robotu, kterou budete mít za dvě hoďky poskládanou a výsledkem bude šikovný a dobře vypadající robot, kterého už bude radost ovládat.
Sice k němu nedostanete hotový ovládací nástroj (jako třeba
právě ROGO), ale nic nebrání tomu si podobný nástroj vytvořit. S dobrým softwarem zvládne robot nejenom jednoduché pohyby v osách, „jak mu motory narostly“, ale třeba sledovat koncem paže zadanou křivku a pohyby kloubů si dopočítávat sám. Na technicky zaměřených školách na podobná témata píšou diplomové práce, vy si je můžete ozkoušet přímo doma.
Odkaz na Robot Zenit k PMD-85, PDF je uloženo ve wiki na Google Sites:
http://sites.google.com…0&d=1
V cisle 2/89 casopisu MojMikro byl navod jak postavit interface pro ZXS a nejaky udelator Fischer Technik, ale uz nevim presne o co slo. Je to vyfocene primo na obalce toho cisla. http://pc.sux.org…MMH%2F1989%2F02
Nojo, to je do userportu (C64 nemá kde jinde jednoduše sehnat výstupy, na joysticích ne). Tedy bez zabudovaného software. A ten je vlastně to hlavní, co jsem k QuickShotu a C64 hledal – jinak se řízení robota zvrhne v outování v Basicu (jako na PMD).
Nedovedu si představit dělat v Basicu vzhledem k jeho nerychlosti nějaký složitější 3D interpolátor nebo vnořované pohybové funkce tak, jak to umí ROGO nebo Forth (použití Forthu není vůbec špatný nápad).
Jinak jsem o víkendu převedl čánek o ZENIT robotu do PDF (obrázky v něm vypadají líp, než v JPG kvůli moiré), ale má 10.3 MB, zatím nikam neuploadnuto.
Robotarm se da najit na netu i pod svym modelovym oznacenim "SVI-2000" a existoval k nemu i modul pro C64, obcas se objevi na eBay. Soft byl myslim na emu-ecke.de, ale z toho je ted retro-donald a spousta veci tam chybi. Obrazek toho IF se nachazi zde: http://home.teleos-web.de…oer.htm
Robotika patrí k počítačom a ani u nás sa nezaháľalo 🙂 Okrem spomenutého Merkúru, bolo možné si na kolene postaviť jednoduchého robota z časopisu ZENIT, ktorý sa ovládal počítačom PMD 85.
http://pmd85.djb-studios.com….zip
Ešte si spomínam, že v časopise Elektrón bola informácia o nejakom robote (nespomeniem si už meno) ovládanom pomocou PMI-80. Postavený bol na nejakej strednej škole.
No co vim, tak Fischer Technik mel modul na ST a Amigu. Aspon je to uvedene ve starem katalogu od Conrada co mam doma.
Pochybuju sice, že by to dělali jen pro MSX, ale ani pro Atari, ani pro C64 či podobné stroje jsem nic nenašel (pro C64 zmínku o nějakém software, ale pro jinou robotarm).
Díky MSX komunitě se zachoval na netu aspoŇ manuál a image ROGO ROMky.
Ani k Legu nebo Fischer Techniku se toho moc najít nedá.
A co není na webu, to jako by neexistovalo.
Pokud si chce někdo s robotem hrát na počítači, na který nejde přeportovat ROGO z MSX, musí si asi naprogramovat vlastní soft.
Pepax mel toho quickshota pred dvema rokama na Foreveru.
http://krupkaj.ic.cz…p;amp;obr=82
Nevis jestli byl nejakej soft i pro jine pocitace nez MSX?
Coz takhle trosku Lega?
https://www.youtube.com/watch?v=NnVECRE2I8U
Lego je hezká věc a RoboKit je perfektní nápad, jen kdyby kromě ST byl i pro osmibity (třeba by se i víc rozšířil).
Moc pěkné, pro zájemce manuál: http://www.atarimania.com/utility-atari-st-robokit_28543.html
Poslední dobou mne ale zaujala spíš Lynxmotion AL5D, speciálně pak RS-232 verze.
Dala by se ovládat Sinclairem QL (nebo jakýmkoli jiným počítačem s RS-232, i tím Atari ST). Má i senzory se zpětnou vazbou, kterou po RS-232 posílá zpět.
Pěkná kovářská práce, a má už slušnou nosnost. Akorát ta cena je bohužel sviňsky vysoká.
http://www.lynxmotion.com/c-130-al5d.aspx a česky na http://www.josefnav.cz/LynxArm.html